Багато пов'язані з сприйняттям положення проблеми просто зникають, коли визнається, що спостерігач повинен бачити себе, а не тільки об'єкти. З цієї точки зору інформація для сприйняття зміни положення міститься в зміни відносного положення проекції спостерігача й об'єкта на сітківку. Розглянемо проблему константності положення. Коли очі повертаються, кожен об'єкт проектується на інше місце сітківки, включаючи проекцію спостерігача, але при цьому не виникає зміни відносного положення ретінальних проекцій об'єктів і спостерігача і, таким чином, немає інформації про зміну положення (див. рис. 3.13). Константность положення в цьому випадку є єдиним можливим результатом. Розглянемо випадок, коли спостерігач повертає голову (рис. 3.14). Змінюється положення проекцій кожного об'єкта, за винятком проекції самого спостерігача. Якщо ви згадайте опис індукованого руху, дане у зв'язку з експериментом Дункера, ви можете передбачити, що в цьому випадку рух буде видно спостерігач. Саме це і відбувається в дійсності. Той же принцип може пояснити феномен індукованого руху власного тіла. Якщо спостерігач знаходиться в рухомому зоровому оточенні, оточення здається нерухомим, а себе спостерігач сприймає рухомим (рис. 3.15.).
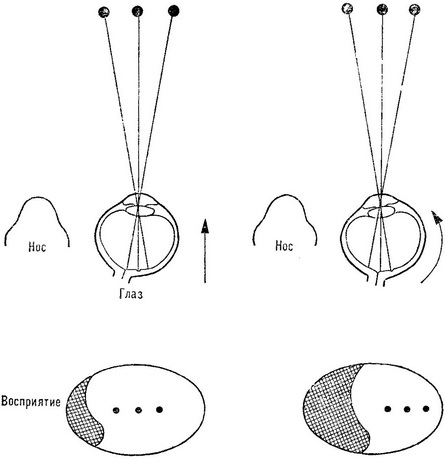
Рис. 3.13. Коли очі повертаються, відносне положення об'єктів і носа залишається незмінним.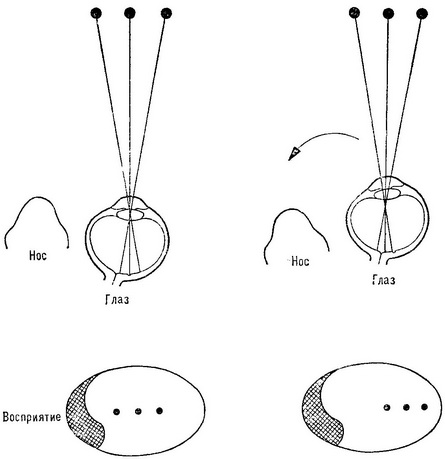
Рис. 3.14. Коли повертається голова, своє ретинальна положення зберігає лише проекція носа.
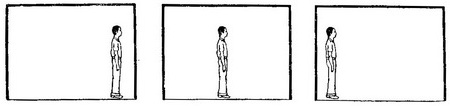
Рис. 3.15. Цього спостерігачеві здається, що він падає вперед, хоча насправді рухається кімната, а сам він нерухомий.
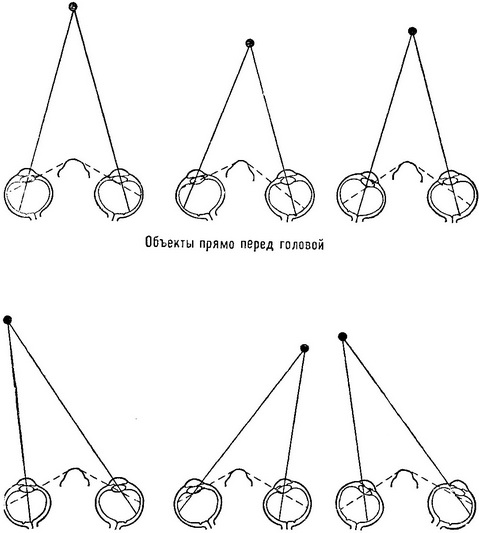
Рис. 3.16. Незалежно від положення очей ретинальные проекції об'єктів, які розташовані прямо перед головою спостерігача, симетричні по відношенню до проекції носа на сітківку. Ретинальные проекції об'єкта, стан яких відмінний від стану прямо перед головою, несиметричні відносно проекції носа на сітківку.
Яким чином ця система могла б справлятися зі сприйняттям специфічних напрямків, таких напрямку прямо перед головою? Напрямок прямо перед головою, як ми бачимо, не має спеціального ретинального коррелята. Однак наш ніс, напрямок якого збігається з цим напрямком, проектується на обидві сітківки. Ці проекції, мабуть, можуть служити в якості точок відліку при оцінці даного напрямку. Як видно з рис 3.16, всі розташовані прямо перед головою об'єкти проектуються на сітківці симетрично щодо проекцій носа, причому ця симетричність проекцій зберігається незалежно від положення очей. Всі об'єкти, розташовані ліворуч або праворуч від цього напрямку, проектуються по відношенню до носа асиметрично. Відносна симетричність проекцій об'єкта, таким чином, може служити специфічним ознакою напряму прямо перед головою.
Ця нова формулювання визначення напрямку (в термінах проекцій на сітківки щодо проекцій носа, а не в термінах абсолютної ретинальной локалізації) вирішує деякі проблеми, які абсолютно незрозумілі в рамках традиційної теорії. Проблема миттєвої адаптації до спотворюючим призмах перестає бути проблемою, як тільки ми визнаємо, що ретинальна проекція спостерігача зміщується призмами тим же самим чином, що і проекції об'єктів поза тіла. Тут є абсолютна ретинальна зміщення, але немає зміщення відносно проекцій носа і орбіт. Проблема косоокості також може бути успішно вирішена за допомогою запропонованої інтерпретації. У разі косоокості одне око постійно перебуває під певним кутом до іншого (рис. 3.17.). Це означає, що фовеа двох очей постійно спрямовані на різні точки в просторі. Незважаючи на це, обидва ока бачать одні й ті ж об'єкти і в одних і тих же напрямках - щось зовсім неймовірне, якщо тільки ми не припустимо, що інформація, що визначає сприйняття дистального положення, полягає у відносному положенні проекції об'єкта і проекції самого спостерігача.
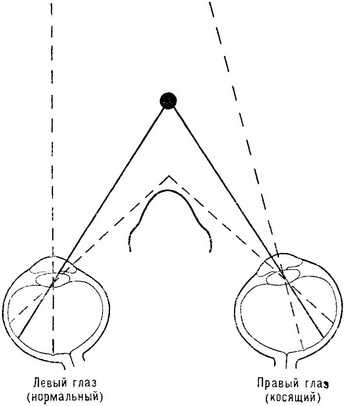 |
Рис. 3.17. Випадки косоокості. Фовеа очей постійно спрямовані в різних напрямках. Ретинальные проекції деякого об'єкта падають на різні («некорреспондирующие») ділянки сітківок обох очей. Це відбувається також і з проекціями носа. |
")